
MIPI CSI-2 Driver - NVIDIA
High-Performance Camera Drivers for NVIDIA Jetson
NVIDIA Jetson Orin Series – MIPI CSI-2 Camera Drivers
We deliver fully production-ready, carrier-board-specific MIPI CSI-2 driver stacks for the entire Jetson Orin family (AGX Orin, Orin NX, Orin Nano). All variants share the same Tegra234 CSI controller, NVCSI pipeline, and libArgus ISP framework, guaranteeing 100% driver code reuse across modules. Whether you need single high-bandwidth 4-lane sensors, multiple 2-lane cameras, virtual-channel multiplexing, or up to 16-lane 6+ camera configurations, we handle every detail: V4L2 sub-device drivers, precise device-tree overlays, jetson-io compatibility, power sequencing, link-frequency optimization, NVC/LSC/EEPROM calibration, Argus tuning plugins, and complete JetPack 6.x flashing packages tested on your exact hardware. Up to 16 CSI-2 lanes (AGX Orin) or 8 lanes (Orin NX/Nano) Multi-camera synchronization and zero-copy GPU pipelines. Full Sony FCB-EV series (EV9500L, EV9520L, etc.) integration with native-to-MIPI conversion. One driver package covers the whole Orin lineup – deploy the same code from prototype (Orin Nano/NX) to production (AGX Orin) without changes.
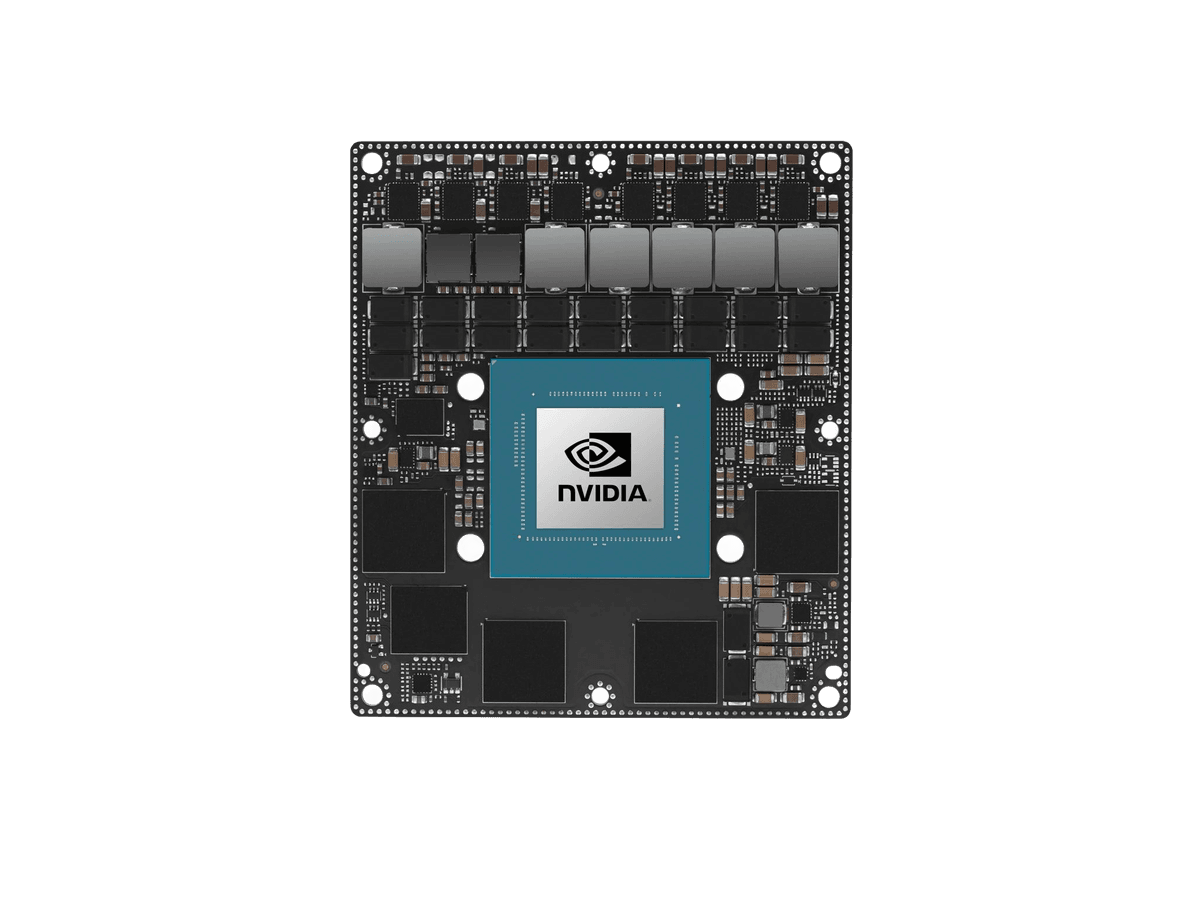
NVIDIA Jetson AGX Orin
The Jetson AGX Orin (32 GB / 64 GB) is NVIDIA’s flagship edge-AI module and exposes a 16-lane MIPI CSI-2 interface, enabling flexible multi-camera configurations on supported carrier boards. The camera software stack is built on the Tegra234 CSI controller and the NVCSI/NVCAM imaging pipeline, combined with NVIDIA’s libargus-based ISP framework for optimized image processing
- Up to 16 CSI-2 Lanes (D-PHY)
- Support for 6+ Simultaneous Cameras
- Ideal for high-bandwidth multi-camera setups
- Full bandwidth available for 4K/8K sensors
Camera sensors are supported through standard V4L2 asynchronous sub-device drivers located under drivers/media/i2c/. Each sensor driver registers with the tegra-camera-platform using device-tree nodes that define CSI port selection, data-lane mapping, clock-lane polarity, link-frequency, HS-settle parameters, D-PHY timing, and virtual-channel usage when applicable. Device-tree overlays are commonly used for configuring these parameters during carrier-board development. Power sequencing for sensors is implemented using the AGX Orin’s onboard PMIC rails and GPIO regulators defined in the device tree, controlling AVDD, DVDD, IOVDD, reset, and power-down lines with precise timing requirements. Image-quality-related data such as EEPROM-based calibration, lens shading correction (LSC), and NVC tuning are loaded dynamically at runtime. ISP tuning is provided through sensor-specific compiled .so tuning libraries placed in /opt/nvidia/libargus. While AGX Orin’s CSI hardware offers high total bandwidth, the achievable multi-camera performance depends on carrier-board lane routing, sensor link speed, resolution, and system load. The module officially supports up to six physical cameras, with additional streams possible using CSI virtual channels depending on sensor and system constraints. Development and deployment use JetPack 5.x or 6.x, with flashing performed through NVIDIA SDK Manager or manual nvflash/nvme workflows for custom boards. The result is a mature, production-ready MIPI CSI-2 integration path suitable for advanced robotics, vision AI, and multi-camera systems.
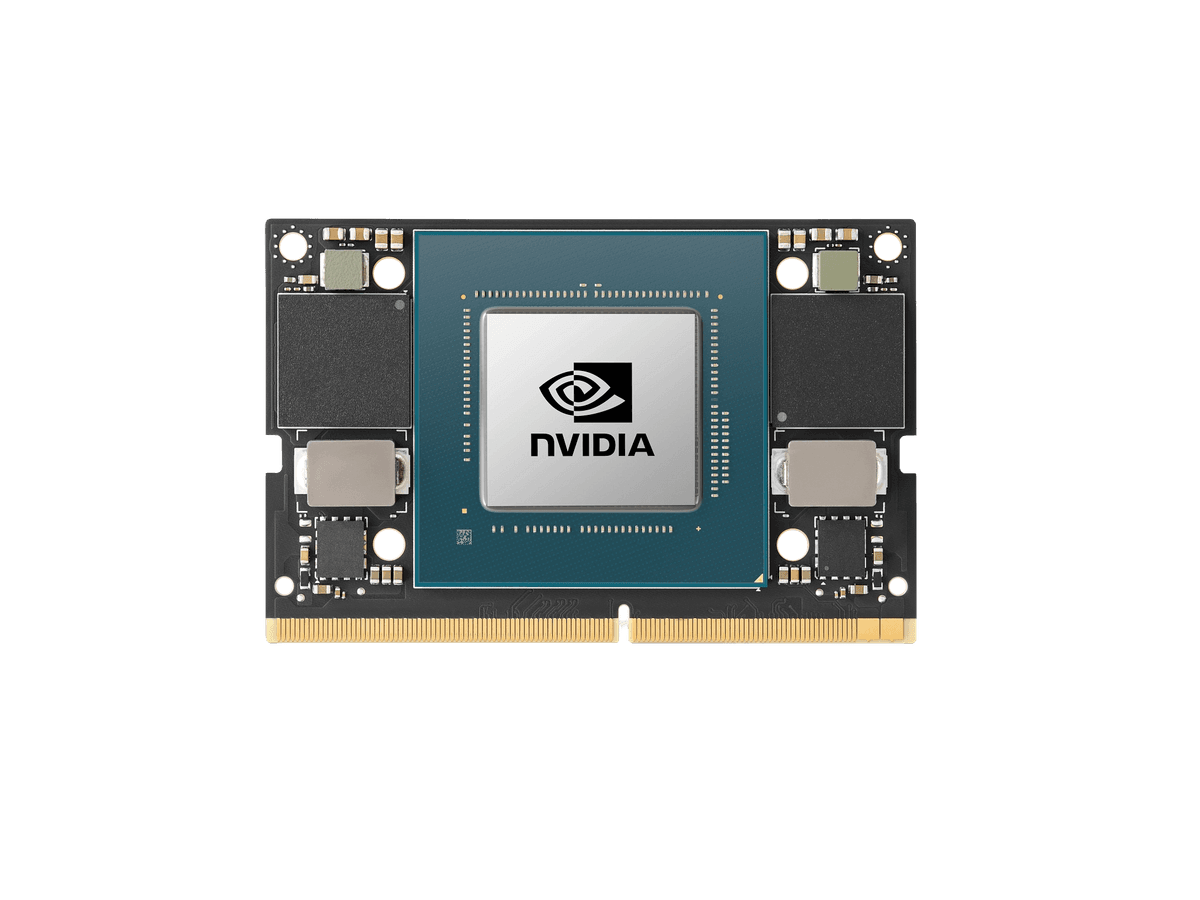
NVIDIA Jetson Orin NX
The Jetson Orin NX (8 GB / 16 GB) provides a compact 69 × 45 mm form factor while exposing 8 MIPI CSI-2 lanes to the module connector. These can be allocated as 2× 4-lane cameras, 4× 2-lane cameras, or mixed configurations depending on the carrier board’s lane routing. The Orin NX shares the same Tegra234 CSI controller and camera software stack as AGX Orin, enabling driver compatibility and direct reuse of sensor integrations across modules.
- 8 CSI-2 Lanes (D-PHY)
- Supports up to 4 Cameras (2-lane)
- Cost-effective for mid-range AI applications
- Same architecture as AGX Orin
Sensor drivers follow the standard V4L2 async-subdevice model, residing under drivers/media/i2c/ and registering through tegra-camera-platform. Device-tree nodes define CSI port indexing, lane numbering, clock-lane position, link-frequency (typically 1.5–2.5 GHz), HS-settle time, and virtual-channel assignments. The same calibration handling (EEPROM/NVC/LSC) and ISP tuning plugin format (.so libraries) used on AGX Orin apply unchanged to Orin NX, making porting straightforward. Power sequencing uses the module’s onboard MAX20024 PMIC rails and GPIO regulators described in the device tree. Since Orin NX offers fewer CSI lanes than AGX Orin, the total number of high-resolution or high-frame-rate sensors is reduced. Practical stream counts depend on lane allocation, per-sensor bandwidth, resolution, framerate, and overall system thermal/power limits. Despite lower lane count, the underlying camera pipeline, Argus ISP integration, and NVCSI controller behavior remain identical to AGX Orin. The entire software/driver workflow remains consistent: JetPack 5.x or 6.x is used for kernel, device-tree, and driver builds; flashing is performed with SDK Manager or command-line utilities for custom carriers. This compatibility makes Orin NX an excellent development or production platform when AGX-level performance is not required, while ensuring driver code reuse and migration with zero redesign of the camera software stack
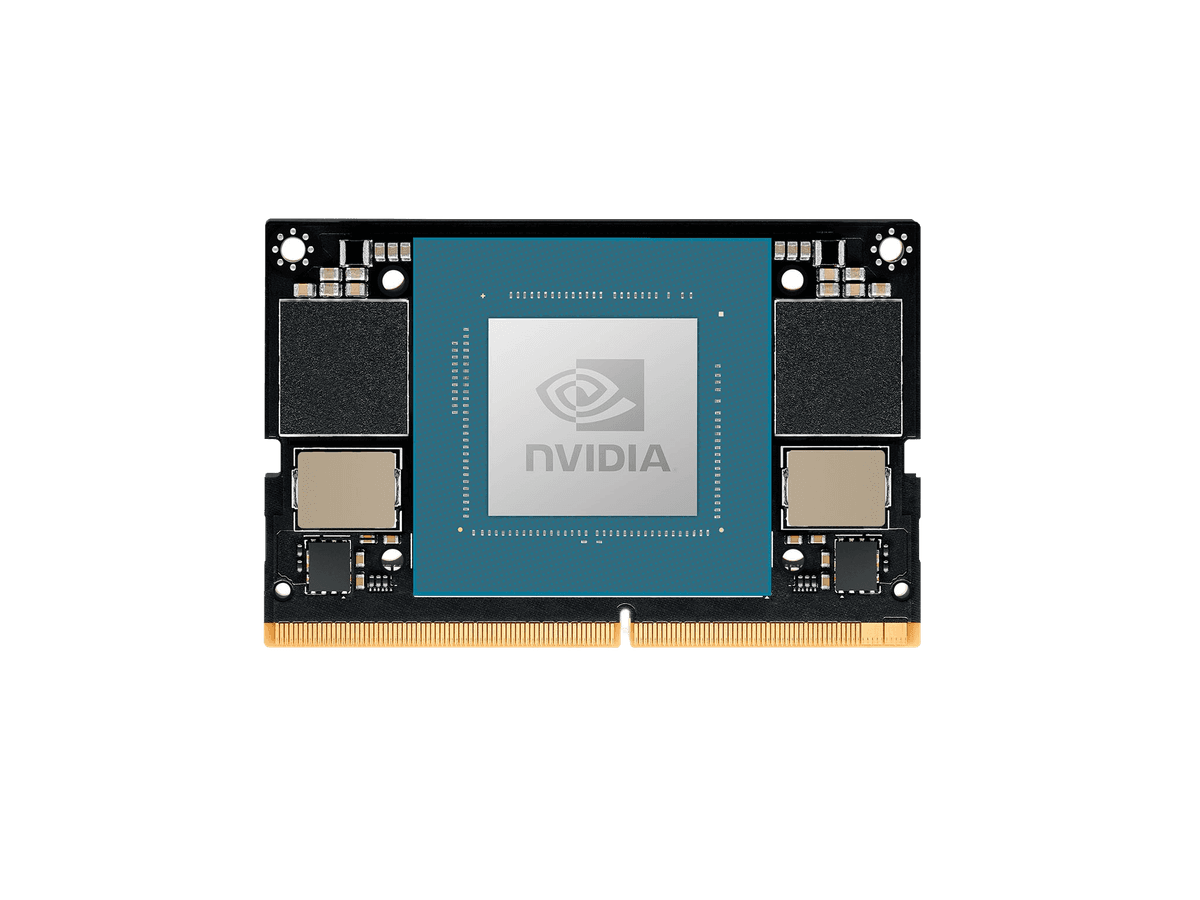
NVIDIA Jetson Orin Nano
The Jetson Orin Nano (4 GB / 8 GB) exposes 8 MIPI CSI-2 lanes through its 260-pin SO-DIMM connector, identical in pinout and lane count to the Orin NX. It therefore shares the exact same Tegra234 CSI controller, NVCSI/NVCAM pipeline, libArgus ISP stack, and camera software architecture as AGX Orin and Orin NX – delivering 100 % driver and device-tree compatibility across the entire Orin family.
- 8 CSI-2 Lanes (D-PHY)
- Supports up to 4 Cameras
- Lowest power consumption in Orin family
- Great for smart cameras and IoT
Sensor integration uses standard V4L2 asynchronous sub-device drivers (drivers/media/i2c/) registered via tegra-camera-platform. Device-tree overlays define CSI port assignment, data-lane mapping, clock-lane polarity, link-frequency (typically 1.5–2.5 GHz), HS-settle timing, and virtual-channel configuration. All calibration mechanisms (EEPROM, NVC, LSC) and ISP tuning plugins (.so libraries in /opt/nvidia/libargus) are identical to the higher-end Orin modules. Power sequencing is handled by the module’s MAX20024 PMIC rails and GPIO regulators defined in the device tree (AVDD, DVDD, IOVDD, reset/power-down GPIOs). Typical configurations support 2× 4-lane or 4× 2-lane cameras (or mixtures), with practical limits determined by carrier-board routing, sensor bandwidth, thermal envelope, and total system load. Build and flashing workflows are unchanged: JetPack 5.x/6.x via SDK Manager or manual nvflash/nvme. This makes Orin Nano the ideal low-cost entry point for Orin-series development – the same production-ready driver package runs unmodified from Orin Nano prototyping to Orin NX scaling and final AGX Orin deployment.
