Evaluating Jetson-Inference on NVIDIA Jetson Orin NX with Sony LVDS Block Cameras, FCB EV-9520L & FCB EV-9500L
Real-Time Edge AI Vision Using LVDS-to-MIPI CSI-2 Camera Integration
A complete evaluation of NVIDIA Jetson Orin NX running Jetson-Inference with Sony FCB-EV9520L and FCB-EV9500L LVDS block cameras. Learn how LVDS Y/Pb/Pr 4:2:2 video is converted to MIPI CSI-2 using a custom adapter for real-time Edge AI vision, object detection, and TensorRT inference
Preview:
This blog presents a deep technical exploration of integrating Sony LVDS block cameras (FCB-EV9520L & FCB-EV9500L) with the NVIDIA Jetson Orin NX using a custom LVDS-to-MIPI CSI-2 interface, and evaluates system performance using Jetson-Inference.
We cover:
- LVDS Y/Pb/Pr 4:2:2 → MIPI CSI-2 conversion
- Custom camera adapter architecture
- Real-time inference benchmarks
- TensorRT-optimized object detection
Introduction
With the rapid adoption of Edge AI across surveillance, intelligent traffic systems, robotics, and industrial automation, the demand for high-quality imaging paired with high-performance AI compute is higher than ever.
The NVIDIA Jetson Orin NX, with up to 32 TOPS of AI performance, is ideal for real-time video analytics. Meanwhile, Sony FCB-EV9520L and FCB-EV9500L remain the gold standard for long-range industrial imaging—offering:
- 30× optical zoom
- Full HD imaging
- Stable LVDS Y/Pb/Pr 4:2:2 output
- High clarity optimized for distances up to 10 km
However, the challenge:
Sony’s LVDS output is not directly compatible with Jetson’s MIPI CSI-2 input.
To solve this, we developed a custom LVDS-to-MIPI CSI-2 adapter, enabling seamless integration with Jetson Orin NX. This blog evaluates the end-to-end AI inference performance using Jetson-Inference and TensorRT.
Objective
To benchmark real-time AI inference on Jetson Orin NX using LVDS block cameras by measuring:
- Object detection throughput (FPS)
- Frame-level & end-to-end latency
- TensorRT acceleration performance
- Overall system stability for continuous edge deployments
Hardware Architecture
Sony FCB-EV9520L / EV9500L Industrial Cameras
Key Features:
- 30× optical zoom
- Full HD 1920×1080 @ 60 FPS
- LVDS Y/Pb/Pr 4:2:2 digital output
- Excellent for long-range detection (up to 10 km with additional optics)
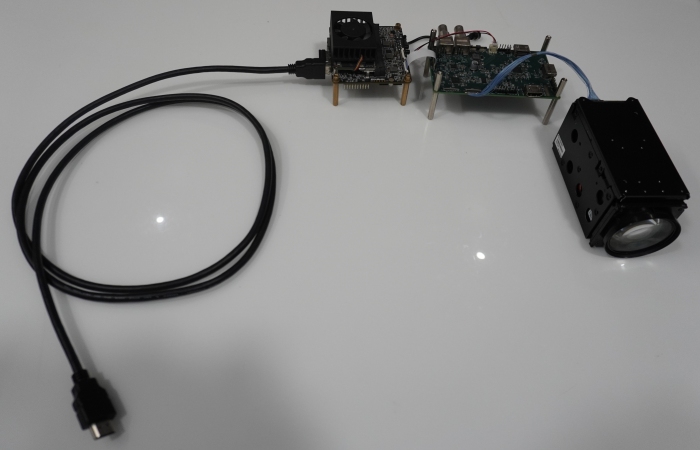
Custom LVDS-to-MIPI CSI-2 Adapter Board
A precision-engineered interface enabling direct connectivity to Jetson.
Core Features
- LVDS → MIPI CSI-2 conversion with low jitter
- 4-lane CSI-2 for high-bandwidth 1080p60 streaming
- Optimized differential pair routing
- Noise-immune 30-pin coaxial connector for Sony blocks
- Compact low-profile form factor suitable for embedded systems
Jetson Orin NX Dev Kit
- Ampere GPU with 1024 CUDA cores
- Up to 32 TOPS AI compute
- JetPack 5.1.2 (L4T 35.4.1)
- High-speed CSI-2 capture pipeline
- Ideal for TensorRT inference, Jetson-Inference, and real-time vision workloads
System Diagram
Block Diagram:

Connection Diagram:
Software Stack
To optimize performance, we used:
- JetPack 5.1.2 (L4T 35.4.1)
- Custom V4L2 driver for MIPI CSI-2 camera input
- Jetson-Inference framework for live detection
- SSD-MobileNet-V2 (TensorRT optimized)
- Jetson-Utils for rendering overlays
- OpenCV & GStreamer for preprocessing
- Python API for rapid prototyping
Inference Pipeline Overview
- MIPI CSI-2 Camera Input (1080p60)
- Frame Scaling & Normalization
- TensorRT Inference using SSD-MobileNet-V 2
- Bounding Box Visualization
- Real-time display or data streaming
Performance Evaluation
Tested using a 1920×1080 live camera feed.
| Metric | Value |
|---|---|
| Inference Speed (1080p) | 30+ FPS |
| TensorRT Latency | 10–15 ms per frame |
| End-to-End Latency | < 50 ms |
| Video Stability | Excellent at 60 FPS |
| Thermal Behavior | Stable with compact cooling |
Video Demo
Shows real-time detection using LVDS-to-MIPI adapter + Jetson-Inference.
Key Observations
- SSD-MobileNet-V2 provided an ideal balance of speed & accuracy
- LVDS-to-MIPI conversion introduced near-zero latency
- Jetson Orin NX handled prolonged operation without throttling
- Long-range zoom capabilities allowed detection over multi-kilometer distances
- System ran stable at 1080p60, ideal for advanced surveillance and industrial AI
Conclusion
By combining Sony FCB-EV9500L / EV9520L with NVIDIA Jetson Orin NX and a custom LVDS-to-MIPI interface, we achieved a production-ready real-time AI vision pipeline with low latency, high stability, and strong inference throughput.
This approach can be deployed across:
- Smart surveillance
- Automated inspection
- Traffic and highway monitoring
- Border & perimeter security
- Industrial Edge AI analytics
The integration proves that industrial block cameras can pair seamlessly with modern AI SoCs to build scalable, long-range intelligent vision systems.
Product Link:
Orin NX Carrier Board: https://www.oppila.in/products/orin-nx
Sony FCB-EV9520L: https://www.oppila.in/products/ev9520l
Sony FCB-EV9500l: https://www.oppila.in/products/ev9500l
FAQs
No, Sony cameras use LVDS output, while Jetson requires MIPI CSI-2. A custom LVDS-to-MIPI adapter is required.
They output Y/Pb/Pr 4:2:2 LVDS digital video.
Full HD 1920×1080 @ 60 FPS.
It provides 32 TOPS of AI compute and powerful GPU acceleration for real-time vision.
It converts LVDS video to a MIPI CSI-2 compatible interface for Jetson.
NVIDIA’s Jetson-Inference with TensorRT optimization.
SSD-MobileNet-V2 offers excellent speed/accuracy trade-off.
Over 30 FPS at 1080p resolution.
It converts LVDS video output from Sony, Tamron, Wonwoo, Videology and Skoopia Block cameras into a USB 3.0 UVC stream for easy integration with Windows or Linux systems.
It supports all LVDS-compatible camera modules that follow the Sony LVDS 30-pin KEL connector pinout (including Sony, Tamron, Wonwoo, Videology and Skoopia Block cameras).
Less than 50 ms (excluding display overhead).
No significant delay—latency impact is negligible.
Yes. Sony cameras + zoom optics support up to 10 km detection with additional lenses.
Yes, it ran stable under high load without thermal throttling.
JetPack 5.1.2, custom V4L2 driver, Jetson-Inference.
Yes. Jetson Orin NX supports TensorRT-accelerated YOLO models.
Yes. It is designed for embedded and industrial installations.
C++ and Python via Jetson-Inference API.
Yes. It supports real-time vehicle and pedestrian detection.
Yes, the coaxial interface ensures high-signal integrity.
Yes, depending on the carrier board and CSI lane configuration.
Surveillance, automotive, traffic enforcement, industrial automation, and remote monitoring.