
Evaluating Jetson-Inference on NVIDIA Jetson Orin NX with Sony LVDS Block Cameras, FCB EV-9520L & FCB EV-9500L
Preview:
A deep dive into deploying Sony industrial-grade LVDS block cameras with the NVIDIA Jetson Orin NX for Real-Time Edge AI vision applications. This blog covers the integration of Y/Pb/Pr 4:2:2 LVDS video outputs from FCB-EV9500L / FCB-EV9520L with MIPI CSI-2 using a custom-designed adapter and evaluates deep learning inference performance using Jetson-Inference.
Introduction:
As Edge AI adoption accelerates in industries like intelligent traffic systems, smart surveillance, and automated inspection, there's an increasing demand for powerful AI compute paired with high-quality vision systems. The NVIDIA Jetson Orin NX—powered by Ampere architecture and capable of delivering up to 32 TOPS—is ideal for such applications. However, integrating it with industrial block cameras, like Sony FCB-EV9520L and FCB-EV9500L, poses a unique engineering challenge due to their LVDS video output in Y/Pb/Pr 4:2:2 format.
This blog shares our complete solution: a custom hardware interface that bridges LVDS to MIPI CSI-2, enabling direct video input into Jetson Orin NX. We then evaluate the system's real-time performance using the Jetson-Inference framework and TensorRT-optimized models.
Objective
To benchmark deep learning inference on the Jetson Orin NX using Sony LVDS cameras, with a focus on:
- Object detection accuracy and throughput
- Real-time inference latency
- System-level performance for Edge AI vision workloads
Hardware Architecture
Sony FCB-EV9520L / FCB-EV9500L Block Cameras
- 30x optical zoom
- Digital LVDS output (Y/Pb/Pr 4:2:2)
- Best suitable for long range detections upto 10Kms
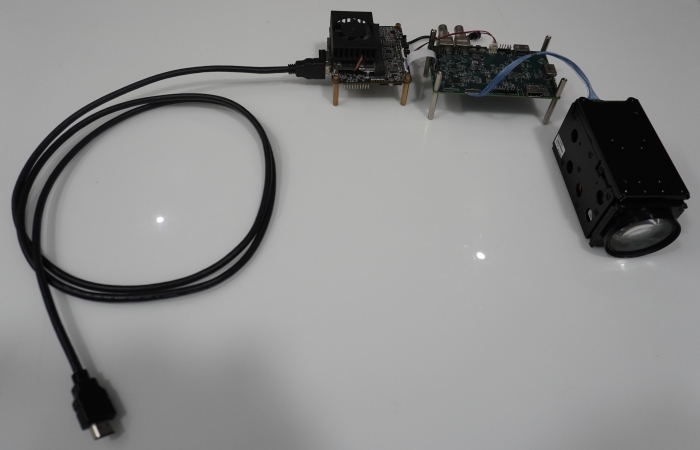
Custom LVDS-to-MIPI CSI-2 Adapter
To interface the LVDS video with Jetson Orin NX, we developed a compact, high-speed adapter board. Key features include:
- LVDS to MIPI CSI-2 bridge logic, engineered for minimal signal degradation
- 4-lane MIPI CSI-2 output for high bandwidth transmission
- 30-pin coaxial camera interface ensuring noise-immune, high-speed connectivity
- Low-profile design suitable for embedded deployments
Jetson Orin NX Dev Kit
- GPU: Ampere architecture, 1024 CUDA cores
- AI Performance: Up to 32 TOPS
- OS/SDK: JetPack 5.1.2 with L4T 35.4.1
- Video Input: Direct MIPI CSI-2 from custom adapter
Block Diagram

Connection Diagram
Software Stack
To maximize inference speed and efficiency, we adopted NVIDIA’s Jetson-Inference framework. The software environment included:
- JetPack 5.1.2 (L4T 35.4.1)
- Custom V4L2 driver for MIPI camera input
- Jetson-Inference repo with SSD-MobileNet-V2 model
- Jetson-Utils, GStreamer, and OpenCV for frame handling and preprocessing
- Python API for rapid prototyping and visualization
Inference Pipeline:
MIPI CSI-2 Input
- Frame Resize & Normalization
- Inference (Onnx, TensorRT)
- Bounding Box Overlay (Jetson-Utils)
Performance Evaluation
We tested the system using a 1920x1080 video stream with real-time object detection via SSD-MobileNet-V2. Key performance metrics included:
| Metric | Value |
| Inference Speed @1080p | 30+ FPS |
| Latency (per frame) | ~10–15 ms (TensorRT-optimized) |
| End-to-End Latency | <50 ms (Excluding display) |
| Thermal Stability | Maintained with low-profile cooling |
Video Demo:
Key Observations
- Inference performance scaled with model complexity and input resolution: SSD-MobileNet-V2 offered a strong balance of speed and accuracy.
- LVDS-to-MIPI bridge introduced minimal delay, thanks to signal integrity optimization and differential pair tuning.
- System stability was robust, even under prolonged, high-load scenarios.
Conclusion
By combining NVIDIA’s Jetson Orin NX with Sony high-performance LVDS block cameras FCB-EV9520L / FCB-EV9500L and a custom-built LVDS-to-MIPI bridge, we successfully enabled real-time AI vision at the edge. The integration of Jetson-Inference provided a lightweight, TensorRT-accelerated path for deploying deep learning models with minimal overhead.
This solution opens the door for scalable, production-ready edge vision systems across industrial, automotive, and surveillance domains.