
Evaluating Jetson-Inference on NVIDIA Jetson Xavier NX with Sony FCB-ER8530
Preview:
An in-depth exploration of integrating the Sony FCB-ER8530 4K block camera with the NVIDIA Jetson Xavier NX for AI-powered vision at the edge. This article details a robust HDMI-to-MIPI interface solution enabling high-definition video capture for real-time inference using the Jetson-Inference framework.
Introduction:
Edge AI systems are pushing boundaries in smart cities, industrial automation, and defense surveillance. While powerful edge compute platforms like the NVIDIA Jetson Xavier NX provide the necessary AI performance (21 TOPS), sourcing compatible high-resolution video input remains a critical challenge—especially when using 4K HDMI output cameras like the Sony FCB-ER8530.
To bridge this gap, we implemented an HDMI-to-MIPI CSI-2 interface, enabling seamless video feed from the FCB-ER8530 into the Jetson Xavier NX. This article outlines the hardware-software integration, benchmarking deep learning inference performance with Jetson-Inference.
Objective
To validate and benchmark real-time AI inference using the Sony FCB-ER8530 HDMI camera and Jetson Xavier NX through:
- Reliable HDMI to MIPI integration
- Real-time object detection performance
- System latency and stability
Hardware Architecture
Camera Input – Sony FCB-ER8530
- 20x Optical Zoom, 12X Digital Zoom
- 4K HDMI Output (3840x2160 @ 30fps) over 30pin coaxial connector
HDMI to MIPI CSI-2 Device Driver
High-performance HDMI-to-MIPI CSI-2 converter driver
Features:
- Up to 4K@30fps pass-through
- Latency-optimized internal buffering
- 4-lane MIPI CSI-2 output
- Compact design with passive cooling
Connects to Jetson Xavier NX via 30-pin MIPI interface
Jetson Xavier NX Dev Kit
- GPU: Volta architecture, 384 CUDA cores + 48 Tensor Cores
- AI Performance: Up to 21 TOPS
- Video Input: Dual MIPI CSI-2 ports
- OS: JetPack 5.1.2 with L4T 35.4.1
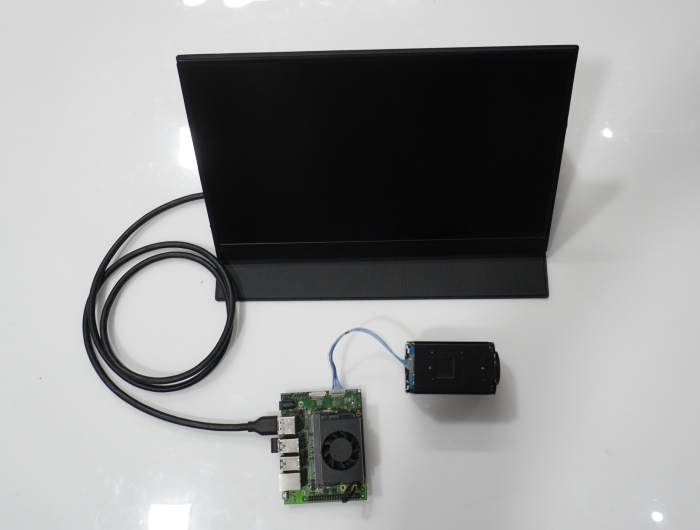
Block Diagram:

Connection Diagram:
Software Stack
We utilized the Jetson-Inference stack for efficient AI model deployment. Key software components included:
- JetPack 5.1.2 (L4T 35.4.1)
- Custom V4L2 MIPI driver for the HDMI-to-MIPI bridge
- Jetson-Inference repo (TensorRT-optimized SSD-MobileNet-V2)
- Jetson-Utils, OpenCV, GStreamer for pipeline integration
- Python bindings for rapid development
Inference Pipeline:
HDMI (via MIPI CSI-2)
- Frame Preprocessing (Resize, Normalize)
- TensorRT Inference (SSD-MobileNet-V2)
- Post-Processing & Visualization (Jetson-Utils)
Performance Evaluation
We benchmarked the system using a Full HD stream downscaled to 1920x1080 for inference. Metrics:
| Metric | Results |
| Inference FPS (1920x1080) | ~28–30 FPS |
| Inference Latency (per frame) | 12–18 ms (avg) |
| End-to-End Latency | ~45 ms |
| Thermal Management | Stable with passive cooling |
Video Demo:
Key Observations
- Inference performance scaled with model complexity and input resolution: SSD-MobileNet-V2 offered a strong balance of speed and accuracy.
- System stability was robust, even under prolonged, high-load scenarios.
- Scalability to higher input resolutions and more complex models is feasible
Conclusion
By integrating the Sony FCB-ER8530 HDMI camera with Jetson Xavier NX via a reliable HDMI-to-MIPI bridge, we demonstrated a viable, high-performance edge vision pipeline. Coupled with NVIDIA’s Jetson-Inference framework, this setup enables rapid deployment of AI vision applications across various industries.
The study highlights its potential for scalable edge deployments using off-the-shelf HDMI cameras with robust AI compute platforms.